top of page
PROJECTS & DEMOS
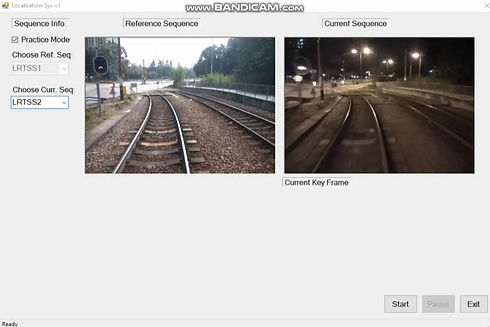
This is a demo of our novel Fast Mono Visual Place Recognition and Localization with a shallow path-oriented offline learning stage and an online place recognition and tracking stage. Key frames are defined as places where can easily be matched. We try to match the current frames to the reference frames. [YouTube for details]

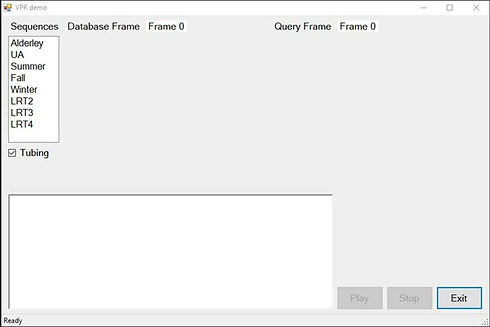
This is a demo of our proposed tubing recognition strategy based on the temporal correlation between consecutive frames. We compared with the Single Nearest Neighbor (SNN) method as shown in the demo. Green bounding box means correct match while red bounding box means incorrect match. [YouTube for details]
Same as the demo shown in above but using another testing sequence. [YouTube for details]

This is a demo of our proposed tubing initialization strategy based on the temporal correlation between consecutive frames. We compared with the Single Nearest Neighbor (SNN) method as shown in the demo. Green bounding box means correct match while red bounding box means incorrect match. [YouTube for details]

Toy example 1: Record the trajectory and the past scenes. Stitch the past scenes together to provide a panorama of the path. This could be useful for autonomous driving, scene reconstruction, place recognition and localization, etc. For example, we can provide guidance for drivers on how to reverse a car. [YouTube for details]

Toy example 2: Record the trajectory. This could be useful for autonomous driving, scene reconstruction, place recognition and localization, etc. For example, we can provide guidance for drivers on how to reverse a car. This could be a promising and practical research topic and application. [YouTube for details]

Toy example 3: Record the trajectory. This could be useful for autonomous driving, scene reconstruction, place recognition and localization, etc. For example, we can provide guidance for drivers on how to reverse a car. This could be a promising and practical research topic and application. [YouTube for details]
Projects and Demos: Projects
bottom of page